このブログでは交通量調査の自動認識について書かれている論文を3つ紹介する。
この研究では深層学習を用いた交通量調査手法を確立することを目的としており、特に動画像を用いて車両の認識と分類を行う技術の有用性を評価している。
現行の交通量調査は主に目視による車両計数で行われており、長時間・多地点での調査では人為的ミスやコストが課題であるとあげられている。そこで、ビデオカメラで撮影した動画像を利用し、深層学習技術を活用した省力化が期待されていると書かれているが、既存技術には誤認識や設置条件の課題があり、実務者への負担軽減が十分でないともある。
既存研としてはObject Detection: 物体の矩形領域を取得してラベル付けする。Semantic Segmentation: 画素単位で物体を認識するが、物体の数を特定するのは困難。
Instance Segmentation: 個別の物体を区別して認識可能。
以上の三つがあげられており、その中でもObject DetectionやInstance Segmentationは車両を個別認識できるため有用であると考えられているが、トラックと普通車の誤分類(図1)や一部の車両認識漏れが課題である(図2)。

図1トラックと普通車の誤分類例

図2車両認識漏れの例
この研究における実装される機能の処理の流れは図3のようになっている。動画像から車両を認識するモデルを認識モデル、認識結果から車両種別を分類するモデルを分類モデルとしており、認識モデルではObjact Detecicnの手法であるYOLOv3(You Only Look Once) の既存モデルを使用し、分類モデルは車両領域を切り取った画像に車両種別の属性を目視で付与した画像を用いて,深層学習による画像分類器のVGG19で学習して構築する.
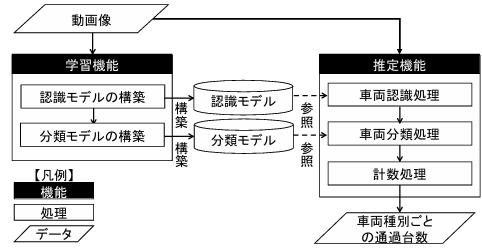
図3フロー処理
撮影の条件としてカメラの垂直方向の角度を変更して行われた。各条件ごとの動画像の角度は図4のようになっている。

図4動画像の角度
実験の結果としてはカメラの垂直方向の角度(20°、40°など)によって、車両認識の精度が大きく変化することが確認された。特に20°で撮影した場合、認識精度が高く、40°で撮影した場合は認識精度が低下した。また、40°で撮影した場合、小型車(ワゴン車や軽トラック)が大型車として誤認識される事例が多く見られた。この誤認識は、車両の上面が大きく映るため、形状が似ている車両を混同することに起因すると考えられている。
実験の結果より、撮影時の垂直角度を20° 前後に調整し,動画像中の車両の正面や側面が映るように撮影することで,通過車両の台数を約9の精度で認識できたことから、深層学習の交通量調査における有用性はあるという結果になったが、既存の手法では類似する車種の誤認識することが課題として残っている。
この研究では交通量調査における車両の通過台数計数精度を向上させ、車種分類の精度を改善することを目的としている。
既存の背景差分、HOG、BRISKなどの手法では、車両の重なりや日照条件などに対応できない問題がある。また、深層学習を活用したObject DetectionやSemantic Segmentationは、高い精度で検出しているが、車両同士の重なりや境界判別には限界がある
この研究では、車両画像の複数の部位(正面、背面、側面、タイヤ、フロントガラス、ナンバープレートなど)を識別することで、車種の分類精度を向上させ、通過する車両の数をより正確に測ろうとしている。
車両検出、部位識別、車種分類を行う学習機能と、検出した車両の部位に基づいて車種を分類し、通過車両の台数を集計する推定機能で構成されていて、処理のフローとしては図5のようになっている。

図5処理フロー
車両検出モデル、部位識別モデル、車種分類モデルはそれぞれ図6、図7、図8となっている。

図6車両検出モデル

図7部位識別モデル

図8車種分類モデル
この研究では二つの実験を行っており、一つ目が既存手法と提案手法を用いて,車両の通過台数を計数し,その結果を目視で確認した正解データと比較することで,提案手法の有用性を確認する実験、二つ目は既存手法と提案手法を用いて,車種ごとの通過台数を計数し,その結果を目視で確認した正解データと比較することで,提案手法の有用性を確認する実験となっている。
一つ目の実験の結果としては、提案手法のほうが計測制度が上がっていることが確認され、重複や反対車線の計測などの誤計測が減少していた。
二つ目の結果としては、提案手法は既存手法と比較して正確な車種分類ができるということが分かった。
結果としては精度が上がっていることは確認されたが、フレアや特定の車種で識別精度が低下するという課題も確認された。
黒色の車両画像や明るさを変更したデータを含む教師データを拡充し、分類精度を向上させることや、誤識別や形状の歪みに対応するため、車両の大まかな形状や位置関係を利用して識別結果を補正する技術の開発日照や気象条件が異なる12時間交通量調査を想定した動画像を用い、提案手法の精度を検証し、現実的な運用条件への適応性を確認が必要である。
この研究ではナンバープレートが不鮮明な場合でも車両の形状を基に車種を判定できるAI技術を開発し、フレアや景色の映り込みが発生した際に,その部分の特徴を抽出できないため,車両の部位の識別に失敗し,車種の判定精度が低下するという課題を解決しようと考えている
既存のナンバープレートの認識の研究では計測範囲が4m以下のものが多く片側2車線以上の道路での活用が困難である。また、光学文字認識や機械学習を用いたものもあるが精度は低いものとなっている。
この研究で使われる手法では車両検出モデル構築処理,部位識別モデル構築処理,分類番号抽出モデル構築処理,目視判別可否判定モデル構築処理,分類番号認識モデル構築処理および車種判定モデル構築処理で構成されており、処理のフローとしては図9のようになっている。ナンバープレートの分類番号を目視で判定できる場合分類番号処理を行い、できない場合車種判定処理を行うものとなっている。

図9処理フロー
この研究の実験では既存手法である車両の形状のみを読み取る手法、分類番号のみを読み取る処方とここで提示された車両の形状と分類番号を読み取る手法で行われた。実験の環境に関しては表1。

表1実験の環境
結果としては提案された手法は、車両の形状とナンバープレートの分類番号を基に、動画像から高精度に車種を判定することができた。また、1時間の動画像解析にかかる時間は約27分であり、目視確認の時間が短縮できることも分かった。課題としては、他の車両が映り込んだ場合に誤判定(図10)が発生することが確認されたが、画像内での領域マスキングなどを適用することで改善されると考えられている。また、図柄入りのナンバープレートにも対応したものの開発によって早期実用化を目指している。

図10誤判定の例
交通量調査の自動認識に関する論文を3つ紹介したが、現在自分が行っている調査においては画質を下げて撮影を行っているため、ナンバープレートを利用した方法では難しそうだと感じた。しかし、深層学習を用いた手法や、カメラを設置する際の角度など参考にできそうなところも多くあるのではないかと考えた。
[1]今井 龍一, 神谷 大介, 山本 雄平, 田中 成典, 中原 匡哉, 中畑 光貴, 汎用的な深層学習器を用いた交通量調査手法に関する基礎的研究, 土木学会論文集F3(土木情報学), 2019, 75 巻, 2 号, p. I_150-I_159
[2]中畑 光貴, 今井 龍一, 神谷 大介, 山本 雄平, 田中 成典, 中原 匡哉, 姜 文渊, 車両部位を識別子とした交通量調査に関する研究, 土木学会論文集F3(土木情報学),2022,78 巻,2号, p.I_158-I_168
[3]住吉 諒, 今井 龍一, 山本 雄平, 中原 匡哉, 神谷 大介, 姜 文渊, 車両の形状とナンバープレートの分類番号の認識結果を用いた車種判定手法に関する研究, AI・データサイエンス論文集, 2024, 5 巻, 3 号, p. 418-426